2024欢迎访问##无锡HDB-FB37101A频率变送器一览表

- 公司名称:湖南盈能电力科技有限公司
(未认证,交易需谨慎) - 联系电话: 13107012553
- 传真:
- 联系地址:湖南省株洲市
- 电子邮件:111@qq.com
- 联系人:林利 先生

- 发布时间:2024/6/27 18:57:47
-
所属分类:电器
详细资料

◆ 规格说明:
| 产品规格 | 8*8 | 产品数量 | 包装说明 | 卖家 | 价格说明 |
◆ 产品说明:
2024欢迎访问##无锡HDB-FB37101A频率变送器一览表湖南盈能电力科技有限公司,专业仪器仪表及自动化控制设备等。主要产品有:数字电测仪表,可编程智能仪表,显示型智能电量变送器,多功能电力仪表,网络电力仪表,微机电动机保护装置,凝露控制器、温湿度控制器、智能凝露温湿度控制器、关状态指示仪、关柜智能操控装置、电流互感器过电压保护器、断路器分合闸线圈保护装置、DJR铝合金加热器、EKT柜内空气调节器、GSN/DXN-T/Q高压带电显示、干式(油式)变压器温度控制仪、智能除湿装置等。
本公司全系列产品技术性能指标全部符合或优于 标准。公司本着“以人为本、诚信立业”的经营原则,为客户持续满意的产品及服务。
如下图所示。单点接地在高频电路里面,因为地线长,地线的阻抗是永远避免不了的,所以并不适用,那怎么呢?下面再介绍“多点接地”。多点接地当电路工作频率较高时,想象一下高频信号在沿着地线传播时,所到之处影响周边电路会有多么严重,因此所有电路就要就近接到地上,地线要求 短,多点接地就产生了。多点接地,其目的是为了降低地线的阻抗,在高频(f一定的条件下)电路中,要降低阻抗,主要从两个方面去考虑,一是减小地线电阻,二是减小地线感抗。
既然电子车牌识别前景这么广阔,那么它本身肯定具有很多相比传统图像识别技术无可比拟的优势与特点,具体的基本要求和技术优势体现在哪些地方呢?我们就简单的列举几条如下:电子车牌的基本要求:可存储数据(车辆型号、颜色、信息);可远距离读取识别标签,固定式读取设备距离在1米以上;可靠性高,读取成功率高达99.99%以上;可同时识别大量标签,每秒2个以上; 识别高速运动中的标签,识别速度可达1km/h以上。
征能ES31多功能四线接地电阻测试仪具有:4线法接地电阻、土壤电阻率、接地电压测量。USB接口,数据上传功能,报功能,数据存储3组,接地电阻量程:.Ω~3.KΩ,土壤电阻率量程:.ΩM~9999KΩM电压量程:~1V、测试频率:128Hz等。以下是测量变压器接地电阻的一个实例。要测量的变压器打征能ES31多功能四线接地电阻测试仪仪表箱、工具袋准备接线按下图接线。16年,全天科技将重点推介可编程直流电源在汽车电子测试领域、电动领域、自动测试领域以及科研机构的应用。全天科技可编程直流电源,内置符合德国DIN4839标准的汽车电子引擎启动测试波形,符合ISO1675-2标准的电压中断测试波形,为汽车电子行业 解决方案。省去测试前繁琐的编辑过程,同时,测试工程师可自行调整波形的设置参数,以便输出不同测试等级下的波形。以下对内置的4种测试波形进一步说明。
如欠压测试项目(V<5%V标称),电压从标称电压下降至标称电压的5%以下,需要时间是1mS。即可在全天科技可编程交流电源中List模式中设置(如下图)V(acstart)=22V,V(acen=19V,Time=1mS;编辑电压变化步骤后保存,触发启动List程序,可编程交流电源自动执行输出。过欠频测试项目测试逆变器在规定的频率范围内(电压正常的情况下)是否可以正常工作;在规定的频率范围段,逆变器正常运行规定的时间后,停止并网供电;在规定的频率范围外则认为电网频率异常,并网逆变器停止工作。
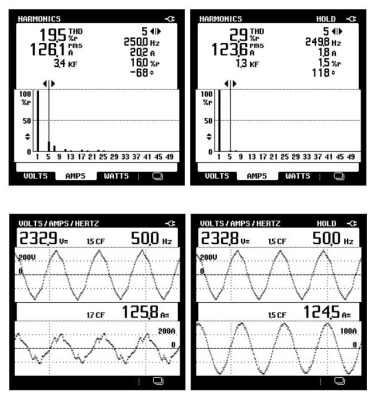
功率测量方法解析:从原理到应用随着控制技术的发展,电压、电流的调制信号得到更广泛的应用。如果信号带有较高的谐波含量,传统的有功功率测量方法将难以测量,本文基于功率分析仪的有功功率测量原理,结合在变频器领域的测量应用进行简单介绍。 常用的有功功率测量方法相位法通过相位测量电路测量电压、电流的相位差,再根据正弦电路有功功率计算公式P=UIcosφ计算出有功功率。由于有功功率计算公式P=UIcosφ是在正弦电路技术上推导出来的,该方法只适用于正弦电路的有功功率测量。
有报道指出,光纤光栅传感器已成功检测了频率为.1Hz~2Hz,大小为1-9e的岩石和地表动态应变。在航天器及船舶中的应用先进的复合材料抗疲劳、抗腐蚀性能较好,而且可以减轻船体或航天器的重量,对于快速航运或飞行具有重要意义,因此复合材料越来越多地被用于航海工具(如飞机的机翼)。为衡量船体的状况,需要了解其不同部位的变形力矩、剪切压力、甲板所受的抨击力,普通船体大约需要1个传感器,因此波长复用能力极强的光纤光栅传感器于船体检测。
汽研联手长安、百度、广汽、福田、一汽、吉利、东风等测试主体单位确定测试场地并展了极为规范的自动驾驶测试,其中自动紧急制动是自动驾驶测试中极为重要的一部分。那么自动驾驶紧急制动(AEB功能)测试时如何进行的呢?自动紧急制动测试首先需要让自动驾驶测试工程师在自动驾驶车辆上调试好专业的测试设备后方才能始严谨的自动驾驶测试。AEB测试实例:前车紧急制动测试自动驾驶车辆与目标车辆保持一定的相对距离行驶,在达到要求车速后目标车刹停,测试自动驾驶车辆是否能触发AEB并且是否会与目标车发生碰撞。
产品图片





上一篇:浙江m41大量圆钢
下一篇:SBS防水卷材的产品标准是
用户其他
以下信息由企业自行提供,该企业负责信息内容的真实性、准确性和合法性。光波网对此不承担任何保证责任。





相关信息
更多
 2024欢迎访问##新余RTH701-3K+E干式变压器温控仪一览表
2024欢迎访问##新余RTH701-3K+E干式变压器温控仪一览表